Innovationen aus den Bereich autonomer Navigation und Anwendungsfälle für künstliche Intelligenz funktionieren nur auf modernsten Robotern und nicht auf älteren Geräten? – Von wegen!
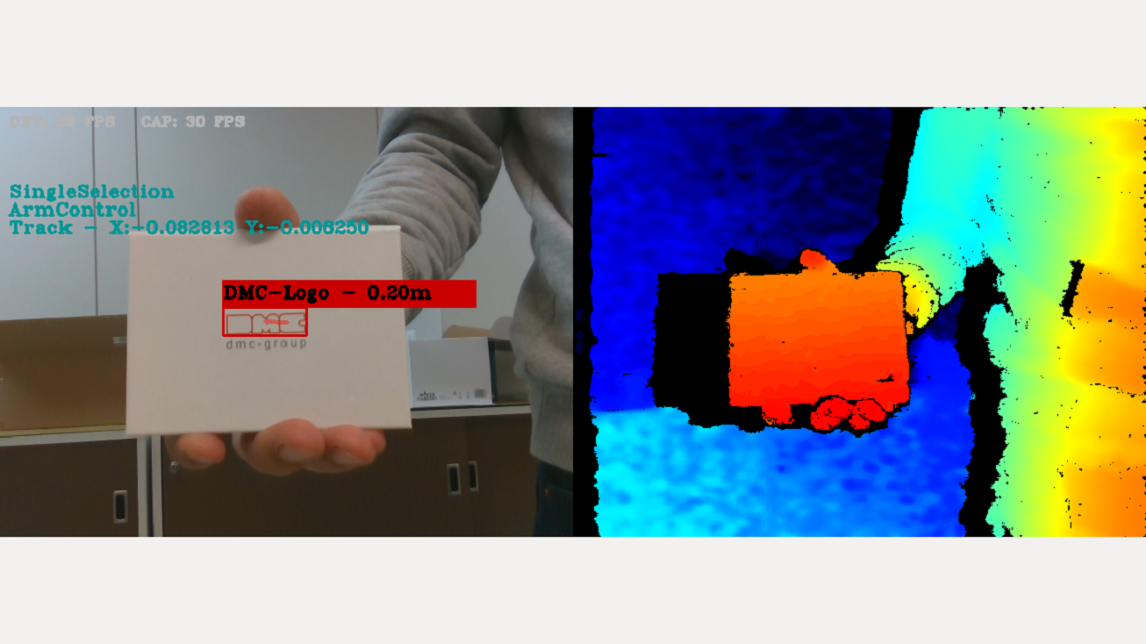
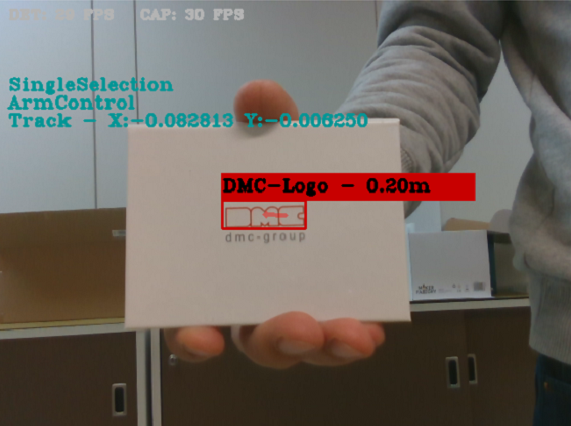
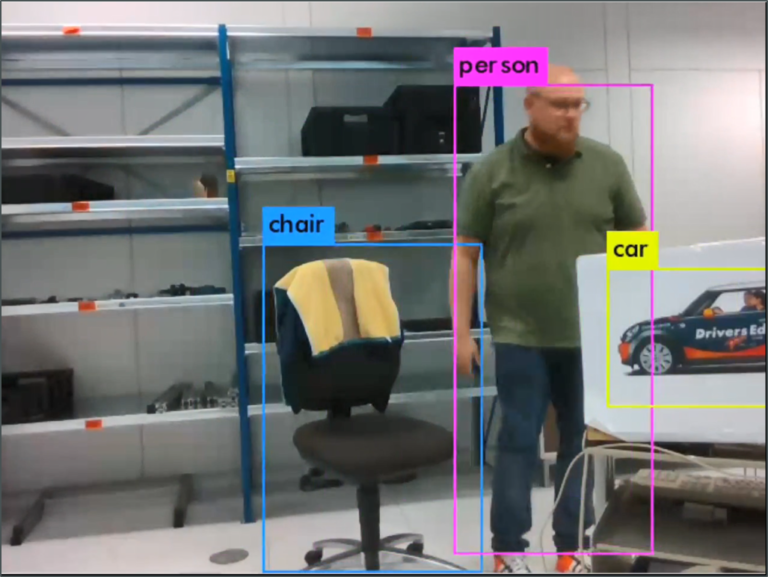
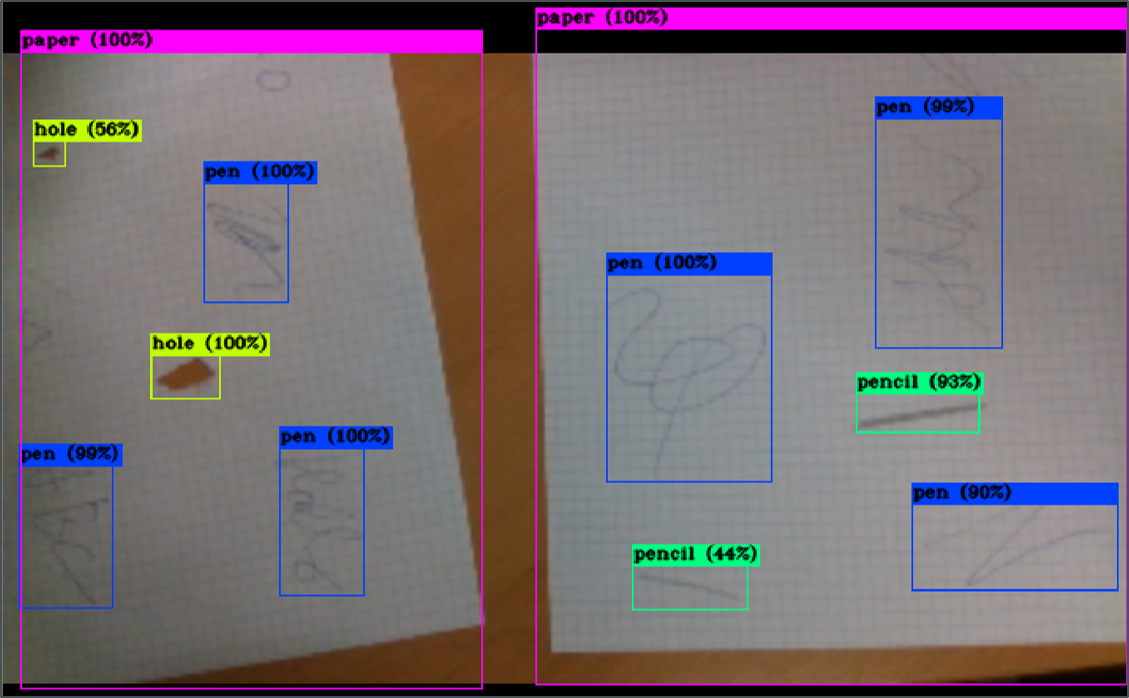
Unser Showcase Smart Navigation zeigt wie es möglich ist auch komplexe Anwendungsfälle wie das Erkennen und Verfolgen eines beliebigen Gegenstandes auf einem kleinen, simplen Roboterarm zu realisieren – auch wenn man initial nicht mehr als eine serielle Schnittstelle zur Verfügung hat!
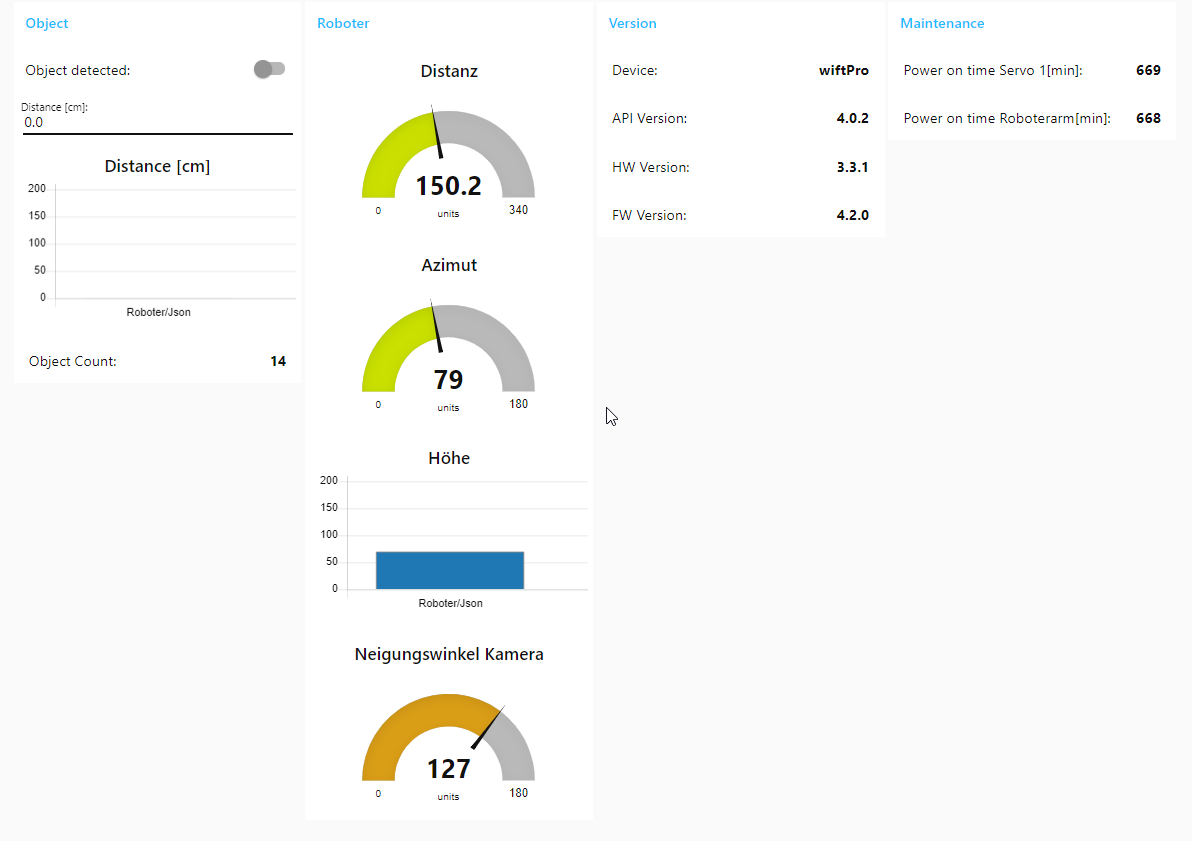
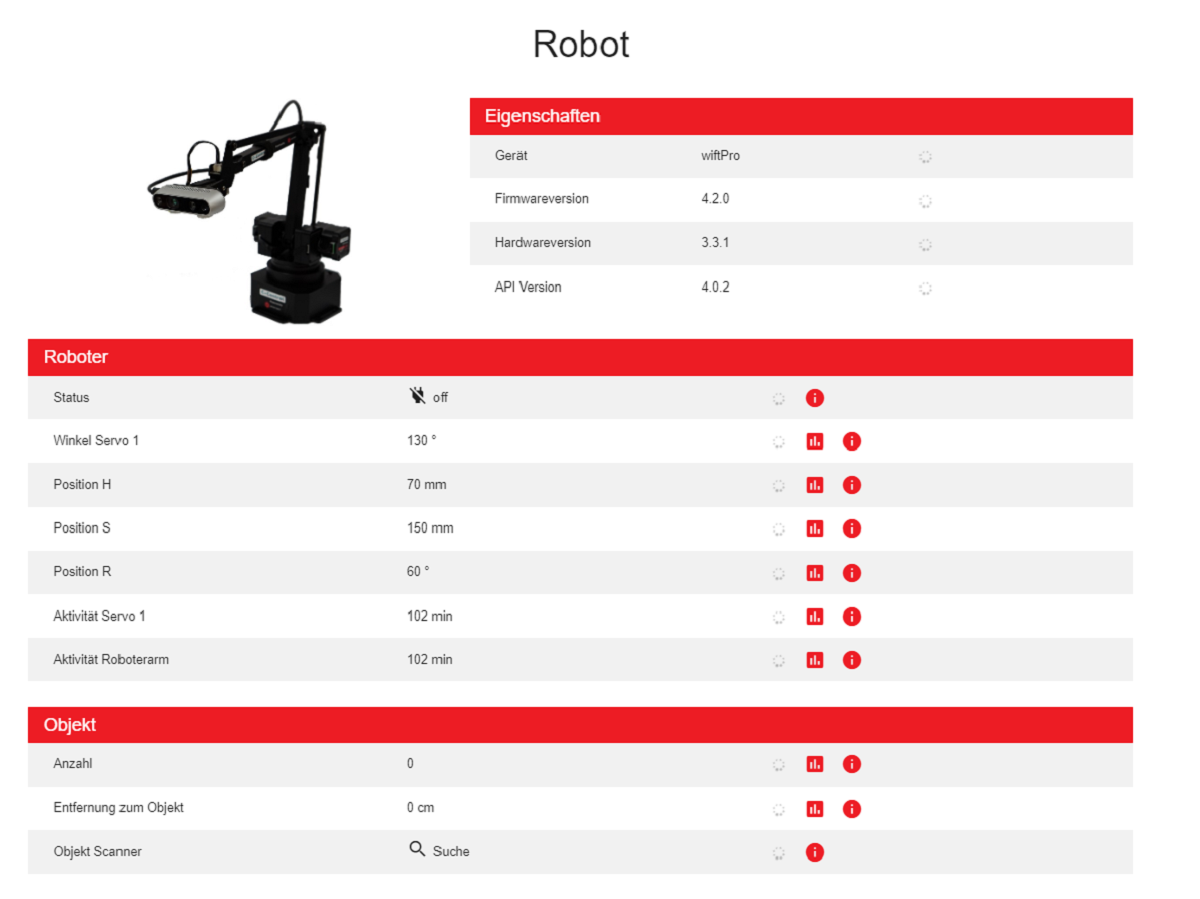
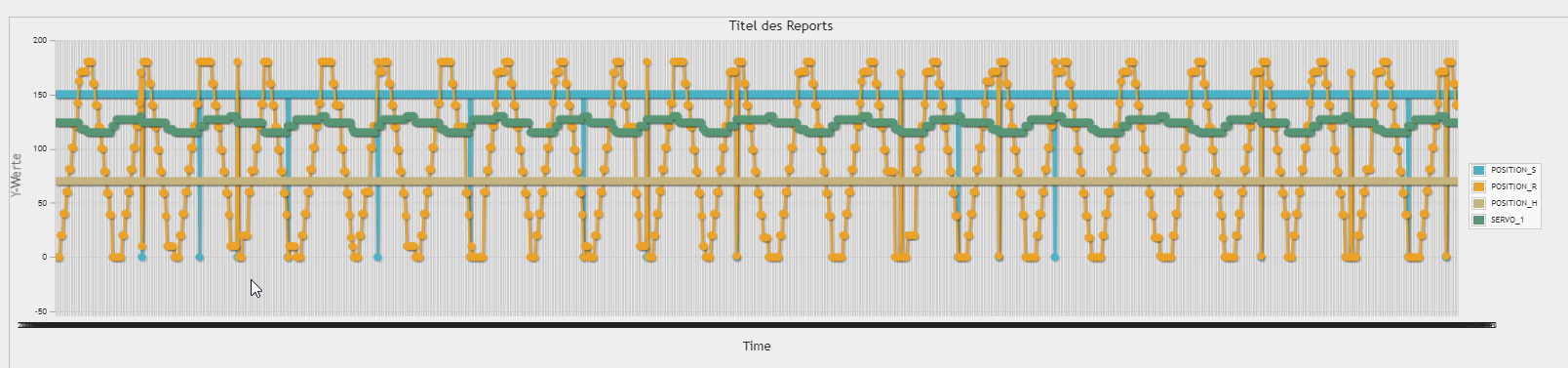
Darüber hinaus zeigt er exemplarisch wie mit den daraus resultierenden Live-Maschinendaten des Roboters intelligent verfahren werden kann und wie diese sowohl angereichert wie auch statistisch ausgewertet werden können.
Folgendes Video geht im Detail darauf ein: